
In a newly published paper “Real-Time Dense Stereo Embedded in A UAV for Road Inspection“), scientists describe AI that can be embedded in a quadcopter for road inspection.
“The frequent detection of different types of road damage, e.g., cracks and potholes, is a critical task in road maintenance,” the researchers wrote, noting that most inspections are still performed manually. “[M]anual visual inspection [is] not only tedious, time-consuming, and costly, but also dangerous for the personnel. Furthermore, the detection results are always subjective and qualitative because decisions entirely depend on the experience of the personnel … With recent advances in airborne technology, unmanned aerial vehicles (UAVs) equipped with digital cameras provide new opportunities for road inspection.”
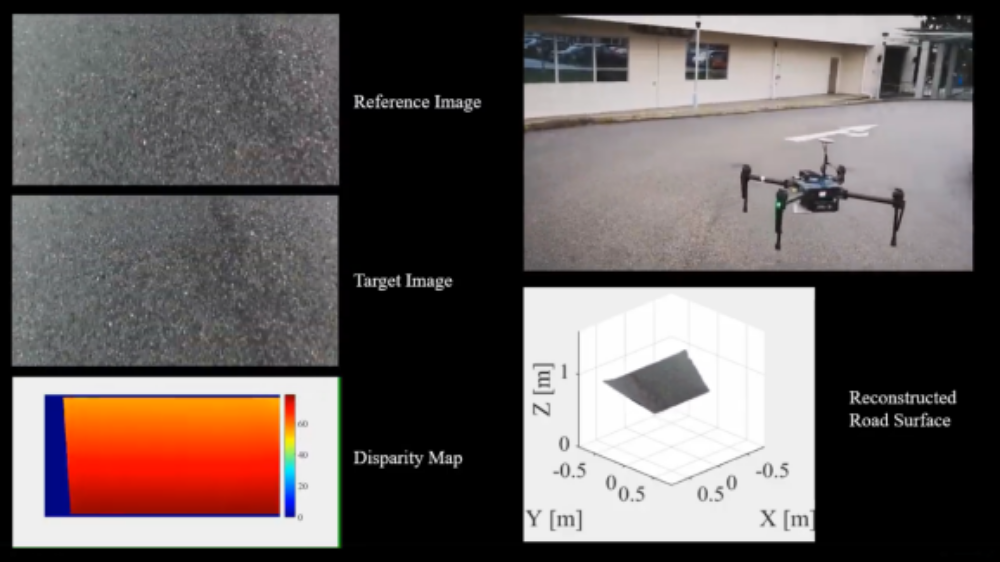
The paper’s authors framework comprised a stereo vision system — an algorithm which extracted 3D depth information from images — that captured a reference view. Disparities between the reference image and real-time snaps of the road were used to produce a “disparity map,” which was fed into a mathematical function that made the damaged areas easier to spot.
The team used a stereo camera mounted on a DJI Matrice 100 drone to capture road images, which were processed using a PC with an Nvidia Jetson TX2 graphics card. Over the course of several tests, they produced three data sets totaling 11,368 stereo image pairs — an original reference and target image — at 640 x 360 resolution, which they compared to synthesized and real data sets of potholes, cracks, and other road damages to quantify the accuracy.
In the end, the researchers say, the damaged road areas became “highly distinguishable” in the disparity maps. “[T]his can provide new opportunities for UAV-based road damage inspection,” they wrote. “In the future, we plan to use the obtained disparity maps to estimate the flight trajectory of the [drone] and reconstruct the 3D maps using the state-of-the-art simultaneous localization and mapping (SLAM) algorithms.”
The paper is available here.
Source: Venture Beat