

The real success for Unmanned Aircraft Vehicles (UAV) will be when they can autonomously operate to complete their appointed task. Autonomous operation means both operating beyond visual line of sight (BVLOS) and the ability to operate independent of a pilot. Before this can happen, UAVs need to be much smarter about their surroundings. A key to smarter UAVs is on-board collision avoidance sensing, such as radar. An understanding of the math behind collision avoidance helps dictate what technologies provide the best option for collision avoidance.
Current air travel collision avoidance is managed by governmental agencies, such as the FAA. A vast infrastructure has been put in place to manage airspace, track flight plans, provide separation, and coordinate handoffs between regions. This has led to the often-quoted fact that it’s much safer to travel by airplane than by car.
UAVs have their own unique requirements which do not map directly into the managed airspace that the FAA and other agencies provide. They are much smaller in size and therefore not easily seen or tracked by radar many kilometers away. By design, their smaller size means they have much stricter limits on their cargo carrying capacity. Being primarily electric motor driven, flight time, battery size, and weight tradeoffs must be managed. Meanwhile, they can still reach speeds of 80-130 km/hr (50-80 m/hr), equivalent to the speed of cars on a freeway.
Many factors should be considered to calculate the requirements for collision avoidance. One of these factors includes the type of collision envisioned: a UAV collision with a fixed object (building, telephone wire, etc.), UAV to UAV collision, or UAV and manned aircraft collision. Another factor is the type of UAV, quadcopter or fixed wing. Finally, the flight path of the UAV should be considered, identifying whether the UAV is ascending, descending, or in level flight. We can simplify the problem by focusing on the worst-case condition. Closure velocity, which provides the minimum reaction time, helps filter the matrix to provide the worst-case scenario. When the closure velocity is maximized, we find that the worst-case scenario is a collision of a UAV with a manned aircraft in a level flight and heading directly toward each other.
An example will help explain the math. The closure velocity is the addition of the speeds of each aircraft. If a UAV is traveling at 80 km/hr (50 m/hr) and a manned plane, such as a Cessna 172, is traveling at 140 km/hr (87 m/hr) then the closure velocity is 220 km/hr (137 m/hr).
𝑣𝐶 = 𝑣𝑈𝐴𝑉 + 𝑣𝑀𝐴 Equation 1
Knowing the closure velocity is critical because from this you can calculate the time to the collision from the point at which one or both aircraft detect the other. If you assume that either the UAV or manned aircraft can detect the other at a separation distance of 100 m (length of a football field), and using the closure velocity above, then there are 1.6 seconds from detection time to collision.

A few more examples are shown below when looking at the other collision types.
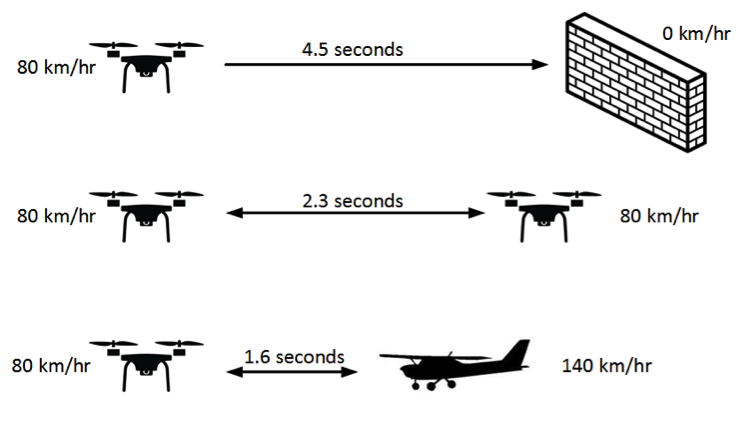
Figure 1. Time to Collision with 100m Detection Range
This is a very short time and our goal is to avoid collisions. To do this, we need to define the collision avoidance time, tCA. The collision avoidance time can be broken down into detection time, reaction time, and avoidance time.
![]()
Detection is done by either on-board electronics, such as radar, or visually by the pilot of the manned aircraft. Radar is preferred over the pilot due to its faster detection time. A short-range radar like the OmniPreSense OPS241-A can detect an object and report its speed within 0.01 seconds. Reaction time of a typical person due to a visual stimulus is 0.25 seconds while a UAV flight controller, such as the PixHawk 1, operating at 168MHz should be able to determine a proper reaction within 0.00001 seconds.
The greatest time is taken by the action of the craft to alter its flight and position significantly enough to avoid a collision. Here the various capabilities of the aircraft come into play, as well as the need to set a safe separation distance. Separation distances on the order of 10s of meters should be considered (commercial aircraft require 300 m vertical separation at 900 km/hr). The math is rudimentary, but a quadcopter at speed that rapidly adjusts its motors could get 20 m of separation distance in a little under 1 second. Fixed wing UAVs and manned aircraft will be much slower because of the time to physically change the aileron position and the effect of the changed airflow.
Adding these up for a quadcopter, a tCA value equal to approximately 1 second may be possible. To avoid a collision, we must make sure that the collision avoidance time is less than the time to collision. In the example above, this is the case and the goal is met.
![]()
The example of the quadcopter indicates that proper detection and collision at 100 m is possible. However, a fixed wing UAV or manned aircraft will take longer and would run the risk of a collision. To solve for these, a longer detection range should be considered. Doubling the detection range, rD, to 200 m directly increases the time to collision, tC, by two times. This can easily be achieved with radar with an increased transmit power, however the balance of additional power-draw (battery size, weight) needs to be analyzed. Various detection range versus closure velocity combinations are shown for different collision avoidance times below.
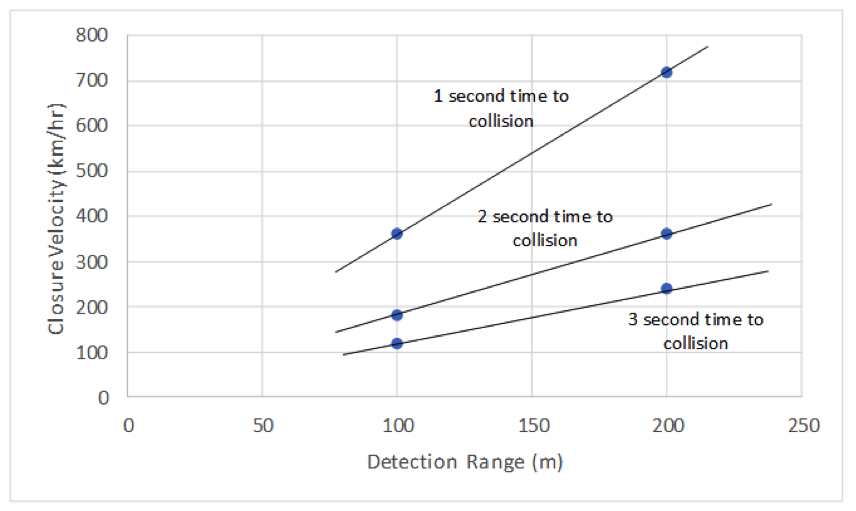
Figure 2. Closure Velocity vs Detection Range
In summary, the amount of time for collision avoidance is a small time that is easily calculated. Based on detection and reaction time, a major conclusion to draw is maximum collision avoidance is achieved when the UAV is the aircraft doing the detection and avoidance.
Hey guys, don’t you think it’s important to disclosed that Rob Frizzell, the author of this article, is also the CEO and co-founder of OmniPreSense, the very sensor being pitched in this article?
Not to mention the total lack of addressing things like sensor uncertainty effect on maneuver timelines, requirements for not having NMAC, or “remain well clear,” and things like airspace operational suitability! (really, how many Cessna 172 pilot do you know who would be OK with small UAS missing their aircraft by 1 second?)
“http://www.businesswire.com/news/home/20170419005041/en/OmniPreSense-Announces-Radar-Module-Maker-Community”
Hi Brian,
Thanks for the comments. There’s no intentions to hide that my company makes radar sensors. We saw the calculations behind collision avoidance was an interesting subject which was is not widely discussed and wanted to share the information.
Thanks for the suggestions to cover other subjects such as NMAC, it’s a good point that UAS should probably have the equivalent of a black box to captur incidents. Maybe that will get covered in a follow-up article. The example numbers provided were used to show how little time there may be for collision avoidance. The math equations hold and can be adjusted to fit the desired timing and separation distance.
Thanks again for the comments.
Brian,
Rob’s bio is available here:
https://www.uasvision.com/contributors/
The first line reads:
Rob Frizzell is CEO and co-founder of short-range radar supplier OmniPreSense