
The University of Sherbrooke in Canada has gotten creative, and come up with a very clever design for a fixed wing drone called SUWAVE (Sherbrooke University Water-Air VEhicle) that uses lakes as landing pads. It crash lands in them, recharges with solar power, and then takes off again with a brilliant hinged propeller.
To do long range, long endurance flight, a drone really needs to be a fixed-wing design, since there’s just no way to get the kind of efficiency you need out of a rotorcraft. Once you’ve accepted this, you have to start figuring out how to make the kinds of compromises that fixed-wing aircraft demand: namely, launch and landing. Launching is difficult because a fixed wing drone needs to be clear of the ground for its prop to work and also needs a certain amount of velocity to get airborne.
Dealing with these compromises often involves stuff like catapults and nets, which are impractical for long term autonomy. Other options include hybrids like tail-sitters or drones with wings as well as extra props to let them take off and land vertically. These systems, however, are complicated and inefficient, and you still have to figure out how reliably get them to find places to safely land. SUWAVE manages to solve all of these problems by going aquatic, which makes it vaguely startling that nobody else seems to have come up with this idea before.
The approach to landing is simple: SUWAVE can use any one of a variety of techniques to crash land face first in the nearest lake. It looks violent, but the 584-gram drone is only being subjected to about 15 g’s of deceleration, which is well within what it’s built to handle. Needless to say, it’s waterproof, and it floats.
 To take off, the drone releases a small latch, and the center, heavier section of its body is free to pivot, causing the motor and propeller to point up into the air.
To take off, the drone releases a small latch, and the center, heavier section of its body is free to pivot, causing the motor and propeller to point up into the air.
To take off again, the drone releases a small latch, and the center section of its body (which contains the battery at the back and the motor at the front) is free to pivot around the front of the wing. Since the battery is towards the back, the center section sinks, which causes the motor and prop to point up into the air. When the motor fires up, the drone is lifted out of the water and into the air, and the center section swings back into alignment with the wing and latches in tightly. Besides the latch, the takeoff technique is entirely passive, without the need for any kind of sensors or actuators, and it can also be used to flip the aircraft over if necessary.
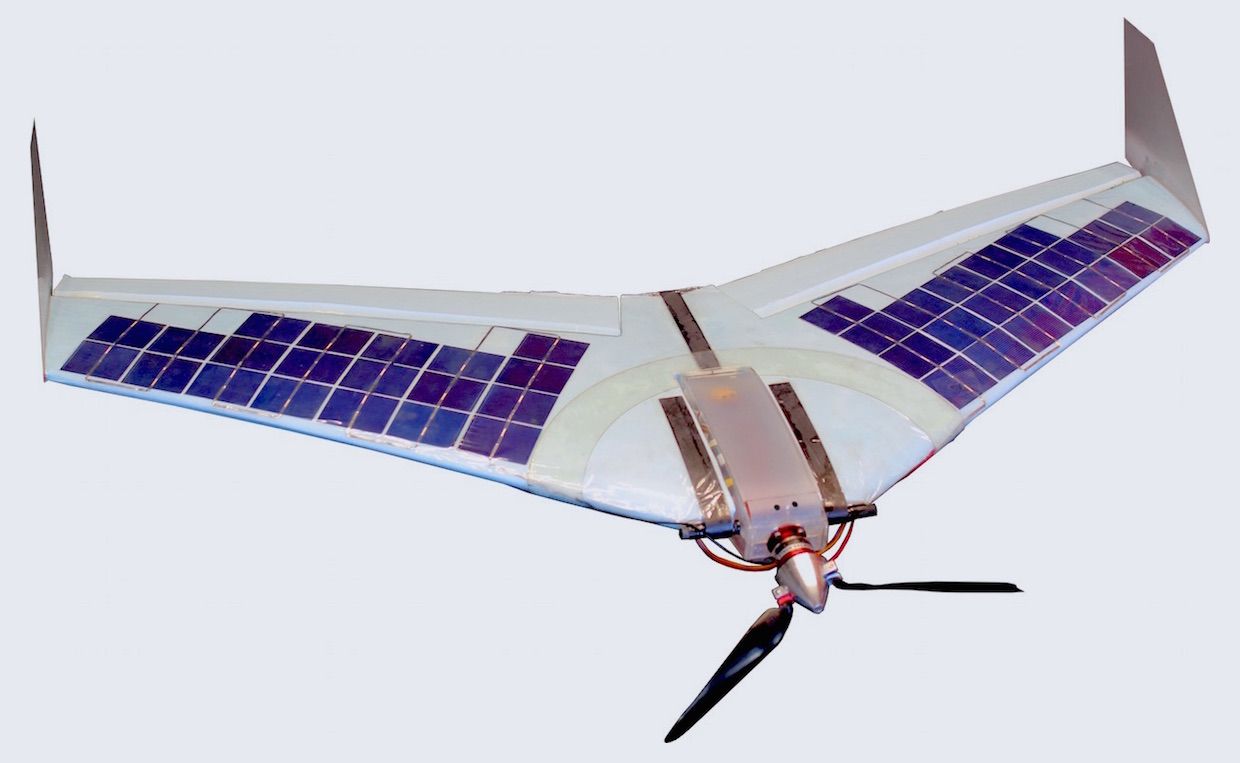
In addition to offering easy to spot and reliably flat and cushiony surfaces for landing and takeoff, lakes are ideal for solar charging. SUWAVE is being equipped with solar cells on its upper wing surfaces, so that it can float there peacefully and recharge its batteries. The researchers say that by flying from lake to lake in Canada (a distance of just 20 km on average separates one Canadian lake from the next), the SUWAVE drone should be able to travel very long distances by lake hopping, recharging, and then repeating the process.

The drone’s novel takeoff and landing strategies were inspired by the Mallard duck and the gannet seabird. When it comes to specific uses for the UAV, Desbiens has a few ideas.
“A swarm of SUWAVE drones could relay each other to continuously monitor a forest fire,” he said. “This drone could also be used in environmental research to fetch water sample from faraway lakes.”
Currently, the team has developed the concept and performed a few flights with it.
“We are now integrating solar panels and are intending to demonstrate lake-to-lake travel and multi-day missions during the summer,” Desbiens said. “Various scenarios will be tested to evaluate its potential for commercialization.”
“Design of a Passive Vertical Takeoff and Landing Aquatic UAV,” by Richard-Alexandre Peloquin, Dominik Thibault, and Alexis Lussier Desbiens from Université de Sherbrooke in Canada, was presented at ICRA 2017 in Singapore.
Images: University of Sherbrooke
Source: IEEE Spectrum
Just brilliant. Simply brilliant. No it is not foolproof, aquatic weeds and vegetation or wind drift into the shore could cause issues not allowing takeoff again, but overall this is a fairly novel and as they said startling that nobody has thought of it before.