
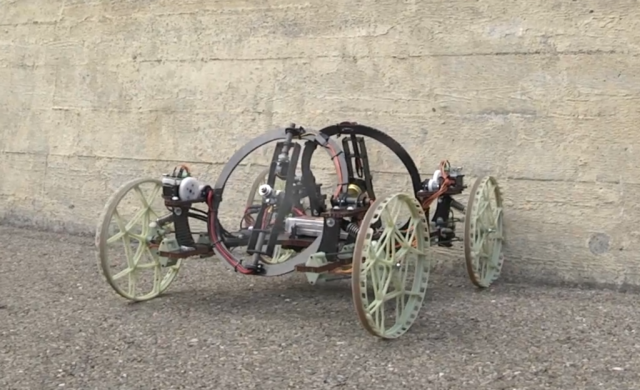
 VertiGo is a wall-climbing robot that is capable of transitioning from the ground to the wall, created in collaboration between Disney Research Zurich and ETH. The robot has two tiltable propellers that provide thrust onto the wall, and four wheels. One pair of wheels is steerable, and each propeller has two degrees of freedom for adjusting the direction of thrust.
VertiGo is a wall-climbing robot that is capable of transitioning from the ground to the wall, created in collaboration between Disney Research Zurich and ETH. The robot has two tiltable propellers that provide thrust onto the wall, and four wheels. One pair of wheels is steerable, and each propeller has two degrees of freedom for adjusting the direction of thrust.
By transitioning from the ground to a wall and back again, VertiGo extends the ability of robots to travel through urban and indoor environments. The robot is able to move on a wall quickly and with agility. The use of propellers to provide thrust onto the wall ensures that the robot is able to traverse over indentations such as masonry. The choice of two propellers rather than one enables a floor-to-wall transition – thrust is applied both towards the wall using the rear propeller, and in an upward direction using the front propeller, resulting in a flip onto the wall.
Technical Background
A key research problem in the deign of VertiGo robot was to maximize the ratio between thrust output and vehicle weight. Weight is minimized by using a central carbon fibre baseplate, while 3D-printed parts in conjunction with carbon-rods are used for more complex three dimensional structures like the wheel suspension or the wheels themselves.
The baseplate provides mounting points for two thruster modules and the wheel suspensions. It also serves as carrier for all the electronic parts and wires. The thrusters are mounted using a two-ringed Cardan Suspension. Integrated servomotors allow the inner and outer ring to be moved independently from one another. This supports the generation of all the forces required to drive on the floor, on walls and theoretically even on the ceiling. The wheels are mounted with a double wishbone suspension based on model car oil dampers, but they are not propelled in any way.
The full design has eight individually controlled actuators. To enable a human operator to conveniently drive the vehicle in a way similar to common RC-cars, an onboard computer is incorporated as a controller. It uses data from a 6-axis IMU in the centre of the robot as well as from two infra red distance sensors mounted in front to estimate its orientation in space. Based on this attitude information, the controller then devises the best positions for all actuators to achieve a desired user input.
Source:
Hi,
It is possible find all the part used in this robot and the calculation made ?
Thank you so much,
Regards,
Jovan
Jovan,
If you click on the link on’Vertigo’ it will take you Disney Research and you can ask them
If you follow this link you should be able to contact Disney Research and/or the authors and ask them:
https://la.disneyresearch.com/publication/vertigo/
Hello. Vertigo is a great research and robot!
I have a question, can I know the purpose of developing these robots or the field of use in detail?